Mechatronics Bot
Goal: capture as many regions as possible on a map of the US where each bot must navigate to the region, detect the frequency of the region's magnetic field, communicate that frequency via SPI, and outrace the other bot.
Designed and built as the final project for Smart Product Design Applications (ME 218B, second quarter in graduate level mechatronics)
Result: Visit http://218bmojo.weebly.com/ for full report and design










MAZE GAME
Description: 2-player cooperative maze game designed and built as the final project for Smart Product Design Fundamentals (ME 218A, first quarter in graduate level mechatronics)
Result: Visit http://me218a-amazeing.weebly.com/ for full report and design








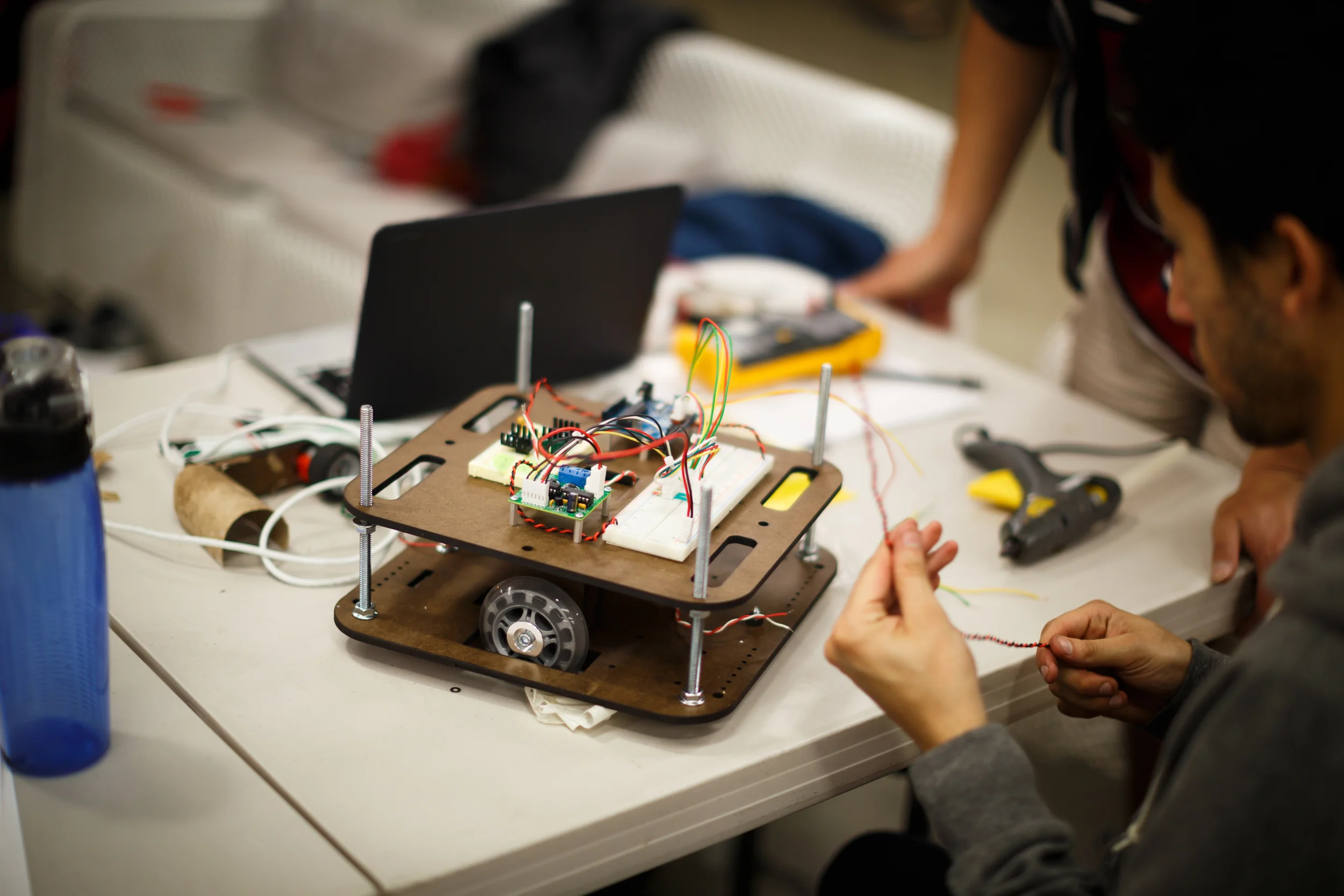
Mechatronics Shooting Bot
Goal: score as many points as possible in a series of 2-minute sudden death elimination rounds
Learned Arduino libraries, servos, DC motor drive systems, basic circuit design (op-amps, comparators, IR sensing, bump sensing, H-bridges), shooter design, modular building
Result: highest scoring team in a class of 120+ students. Visit www.teamrarity.weebly.com for full report and design.









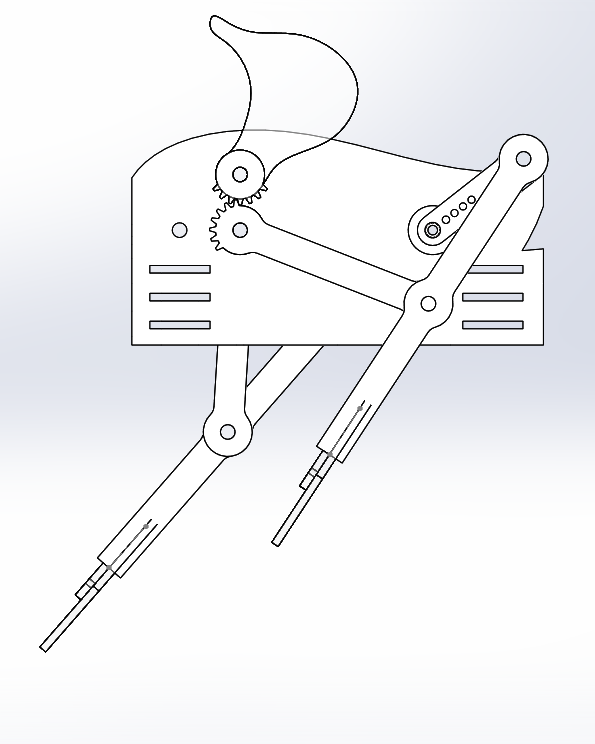
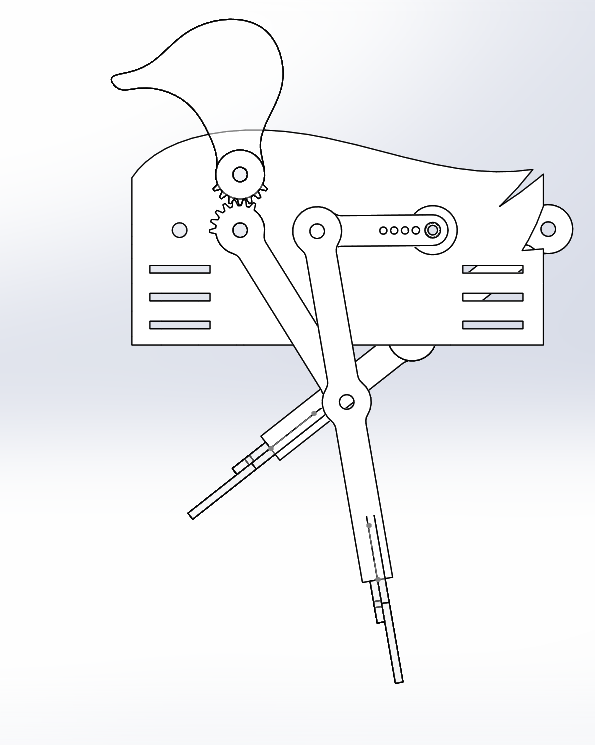
Biomimetic Duck
Goal: using a 4-bar linkage and AA battery pack, design, test, and construct a biomimetic duck that moves at a minimum speed of 30 cm/s
Learned about Tamiya motors, gear trains, laser cut prototyping, material properties (polystyrene, duron, acrylic), four-bar linkages, motor characterization and optimization, Matlab analysis of coupler curve and power








Robotic Crawler
Goal: carry 200g up an inclined ramp, pick up an additional 200g halfway up, then return down the ramp as fast as possible while minimizing energy consumption
Learned: basic gear ratios (based on what is given in the Lego kit), chassis and transmission design, performance analysis (motor losses, gearbox losses, wheel losses, transmission losses, overall efficiency)
